Introduction
This is a car gadget which is a present for my wife who got a driver’s license not long ago. In fact, the traffic in Vietnam is terrifyingly dangerous because vehicle owners usually break the rules. For example, reckless driving, road rage, making improper turns, following too close, jaywalking and accidents are common sense in Hanoi. Driving is truly a big challenge for a new driver. This device may improve one-way communication between the driver and another from the following vehicle.
Main features
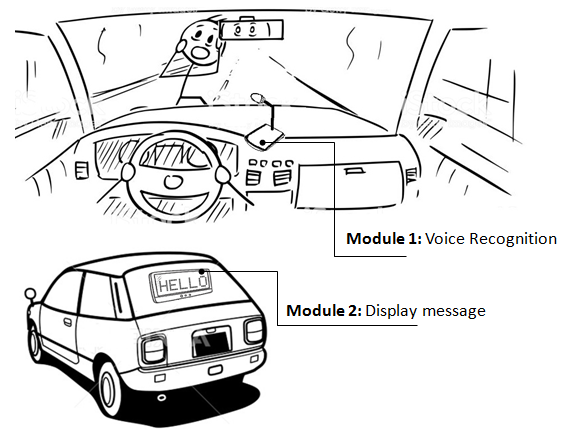
This device has two separated modules:
- The first module will be set up in front of the driver. It can recognize the driver's voice. Then it automatically translates driver voice to text commands and forwards these commands to the other module which is installed in the rear-end of the car.
- The second module receives the command from the first module and displays corresponding content on the led matrix screen. It also reads car speed from the GPS module, automatically calculates and shows a safe following distance between two vehicles in the form of a warning message on an LED matrix screen.
Moreover, it allows car owners to show some advertisements while their car runs stable on the road.
Some typical user cases
Jaywalking or accidents might happen while you are behind the wheel. As a consequence, the driver from the following vehicle(tailgater) would immediately change lane, speed up and overtake without consideration. My gadget prevents this dangerous action by providing more detailed information about what is happening in front of the car to the tailgater.
Another use case, following too closely behind another vehicle is deadly action in freeways. The gadget receives speed from a GPS signal and automatically calculates the stopping distance that is referred to as how far it takes you to bring the car to a full stop in an emergency number of seconds. This number is always displayed on the rear-end screen which is controlled by a second module.

How to build this device by yourself?
Hardware
a. Schematic
a. Schematic


b. Prototype product


Firmware
Demo board on Zumo
The second module is placed on the Zumo robot shield. I also implemented some commands to control Zumo do some simple action as forwarding, turn left, turn right, obstacle avoidance ...

Objective
According to recent research, 10 thousand deceased are caused by accidents every year. Reducing the number of deaths and traffic jams and increasing driver’s awareness in the city are my ultimate goals.
Limitation
1. The Voice recognition module responds slowly.
2. LED matrix screen height is limited. It is a bit difficult to see the message in long-distance between two vehicles.
...tobe continue
Comments
Post a Comment